与其他3D技术相比,飞行时间(ToF)最适合需要灵活操作的应用。例如,飞行时间系统可以安装在移动的机器人上,或者使用其工厂校准(取决于设置)来测量变化的距离。该系统还可以适应各种操作设置,使得飞行时间系统非常适合在复杂的环境和条件下使用。
飞行时间也非常适合具有快速移动场景并且需要在多个距离范围(包括长距离)进行可靠实时决策的应用。使用飞行时间系统,不需要可能导致非确定场景延迟和较低检测精度的大量计算。我们的飞行时间系统提供实时图像信息,具有快速响应时间,无运动模糊。由于它们是固态设计,耗电量和计算量更少,因此稳健,紧凑,成本低。
飞行时间如何运行?
飞行时间成像系统发射红外脉冲光,并测量从场景中的物体反射的光返回系统需要多长时间。
在间接飞行时间成像系统中,系统通过计算光波发射到物体和反射回来时的相位差来测量距离。这使得系统能够构建3D地图。飞行时间系统在各种挑战性条件下为用户提供大量信息。
应用
飞行时间可以在复杂条件和不断变化的环境中做出可靠的实时决策。



仓库/物流管理

拾取和放置机器人

工厂自动化机器人


飞行时间应用的主要挑战
我们的产品专注于专业市场。在这些市场上,应用需求具有挑战性,并且难以通过民用市场上可用的飞行时间传感器来解决。我们的产品专门为解决当前飞行时间挑战而设计,包括:



光能的最佳使用

快速移动场景的快速可靠的3D信息,无运动伪影

对环境光的稳健性
• 得益于我们的每像素多点击创新技术,我们的传感器可以最大限度地减少运动伪影,优化地使用光功率。
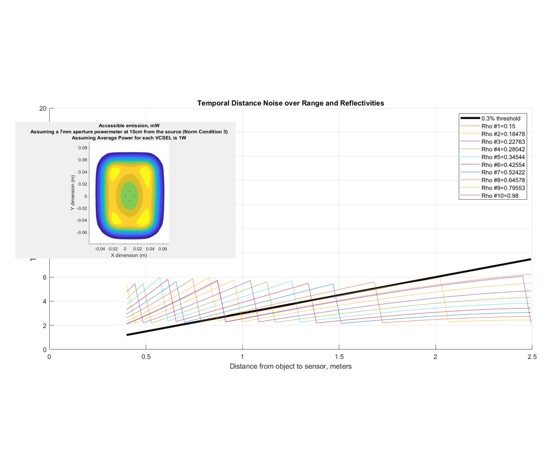
• 飞行时间本质上是极高动态范围的应用,随着距离的平方而增加,并随反射率范围线性增加。当长距离与宽反射率范围相结合时,很容易导致需要管理超过80dB的线性动态范围的应用。我们的传感器提供独特的片上功能以处理这一问题,实现了关键飞行时间应用参数(如距离与反射率范围、精度与视场等)之间的非并行权衡,最大限度地减少运动模糊,使您能够到达中远距离,并实时适应操作条件。
• 创新的多系统管理也嵌入在芯片上,以避免同时运行的飞行时间系统之间的干扰。
我们的飞行时间专长和能力
Teledyne e2v拥有超过10年的飞行时间经验,为客户提供的技术解决方案包括:CMOS图像传感器,定制相机模块,完整的系统集成支持等等。这包括评估平台的参考设计、所有系统级尺寸、光和光学评估、眼睛安全考虑、建模和模拟、算法和校准。这有助于客户缩短上市时间,并获得最佳的飞行时间系统来满足其应用需求。

3D创新实验室
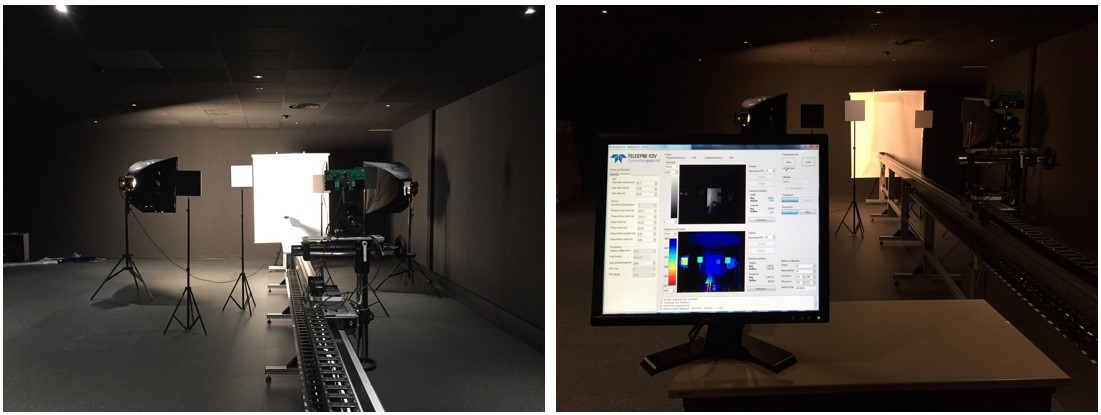
客户支持


评估工具包
参考设计